

DLG-Merkblatt 398
3. Auflage, Stand 07/2014
Autoren:
- DLG-Ausschuss Technik in der Tierhaltung
- Dr. Rosemarie Oberschätzl-Kopp, Lely Deutschland GmbH
- Dr. Bernhard Haidn, Bayerische Landesanstalt für Landwirtschaft (LfL)
1. Einleitung
Wachsende Milchvieh- und Mastrinderbestände in landwirtschaftlichen Betrieben führen zu höheren Arbeitsbelastungen. Um den Zielen einer Arbeitszeitverringerung und -flexibilisierung, einer Arbeitserleichterung und einer einzeltierbezogenen Versorgung ihrer Herden gerecht werden zu können, setzen insbesondere wachsende Familienbetriebe auf die Automatisierung von Arbeitsprozessen. Ein Beispiel ist das Automatische Melken (AMS), welches in den letzten 20 Jahren insbesondere in Regionen mit mittleren Kuhbeständen sehr stark an Bedeutung gewonnen hat.
Aber auch die Automatisierung der Fütterung durch automatische Fütterungssysteme findet vermehrte Verbreitung. Schätzungen zufolge werden derzeit europaweit etwa 1.000 Anlagen genutzt (Bonsels et al., 2013). Bayerische Betriebe investieren zunehmend in diese Technik. Dort dürfte bis Ende 2014 die Zahl von 100 automatischen Fütterungsanlagen überschritten werden, wohingegen Firmenangaben zu Folge im Frühjahr 2011 lediglich 22 Betriebe in dieser Region automatisch fütterten.

Wie eine Umfrage des Instituts für Landtechnik und Tierhaltung der Bayerischen Landesanstalt für Landwirtschaft im Frühjahr 2011 bei 21 Milchviehhaltern mit einem automatischen Fütterungssystem zeigte, sind die Motivationen der Landwirte zur Anschaffung eines automatischen Fütterungssystems sehr vielseitig. Während die Mehrheit der Betriebsleiter aus unternehmerischer Sicht insbesondere eine Reduzierung der körperlichen Belastung für die Futtervorlage, eine Verringerung des Arbeitszeitbedarfs und eine Flexibilisierung ihrer Arbeitszeiteinteilung erreichen möchten, wird ebenso das Ziel einer Einsparung von Bau- und Mechanisierungskosten angestrebt. Neben diesen arbeitswirtschaftlichen und verfahrenstechnischen Aspekten stehen für die Milchviehhalter auch Vorteile für ihre Tiere im Vordergrund. Die Mehrheit schätzt die Möglichkeit einer mehrmals täglichen Vorlage frisch erstellter Rationen und erhofft sich dadurch geringere verbleibende Futterrestmengen im Trog. Durch die Möglichkeit einer leistungsgruppenbezogenen Fütterung streben die Betriebsleiter nach einer besseren Futterverwertung der Mischrationen ihrer Kühe. Etwa die Hälfte der befragten Landwirte hat neben der Fütterung auch das Melken automatisiert. Jene Betriebsleiter möchten durch die häufigere Futtervorlage eine Erhöhung der Herdenaktivität und in Folge dessen eine höhere und gleichmäßigere Auslastung ihrer automatischen Melksysteme im Tagesverlauf erreichen (Oberschätzl, 2012; Siefer, 2012).
Doch welche technischen Möglichkeiten sind derzeit vorhanden, um den Erwartungen der Landwirte gerecht werden zu können? Und welche Aspekte sind bei der Planung eines automatischen Fütterungssystems zu berücksichtigen? Jene Fragen werden in diesem Merkblatt näher behandelt.
2. Automatische Fütterungssysteme
Derzeit werden verschiedene Systeme automatischer Fütterung auf dem Markt angeboten. Diese können betriebsindividuell kombiniert und eingesetzt werden. Drei Automatisierungsstufen lassen sich unterscheiden (Haidn et al., 2013):
Stufe I: Mischen – Verteilen – (Nachschieben)
Stufe II: Mischer Befüllen – Mischen – Verteilen – (Nachschieben)
Stufe III: Entnahme und Transport – Mischer Befüllen – Mischen – Verteilen – (Nachschieben)
Bei Automatisierungsstufe I muss ein stationärer Futtermischer jeweils durch mobile Geräte aus Flachsilos befüllt werden. Der Vorteil dieser Variante ist, dass eine Leistungsgruppe automatisiert mehrmals täglich gefüttert werden kann, doch nimmt die Befüllung des Futtermischers nach wie vor Zeit in Anspruch. Stufe II zeichnet sich durch ihre Fähigkeit aus, dass alle Leistungsgruppen mehrmals am Tag gefüttert werden können und der Landwirt nicht mehr an feste Befüll- und Fütterungszeiten gebunden ist. Doch stellen die Vorratsbehälter einen wichtigen Kostenfaktor dar. Eine Vollautomatische Fütterung der Stufe III erfolgt bislang nur in Verbindung mit Hoch- oder Tiefsilos, welche jedoch im Bau und hinsichtlich des Energieverbrauchs verhältnismäßig teuer einzustufen sind. Abbildung 1 gibt einen Überblick über die verschiedenen Techniken in der Prozesskette zur Realisierung der verschiedenen Automatisierungsstufen.


2.1. Systemübersicht
Für die automatische Fütterung von Rindern wurden verschiedene technische Ansätze erarbeitet (Abbildung 2). Während für eine Einzeltierbezogene Fütterung lediglich ein Prototyp in Form einer Mischfutterabrufstation (System Atlantis der Firma Lely) entwickelt und nicht mehr weiter verfolgt wurde, finden derzeit ausschließlich Gruppen bezogene Systeme ihren Einsatz. Mit jenen Verfahren wird einer Tiergruppe die gleiche Ration mehrmals am Tag am Fressplatz vorgelegt (Wendl & Harms, 2007).
Die Gruppen bezogenen Anlagen sind in stationäre und mobile Systeme zu unterteilen. Ein wesentlicher Unterschied zwischen diesen Systemen liegt in der Bevorratung des Futters und im Mischsystem begründet, welches nach den konventionellen Verfahren von Futtermischwagen gestaltet sein kann (Horizontal-, Vertikal-, Freifall-Mischer). Weitere Unterscheidungskriterien stellen die Ausbringung der Futtermischung (Futterband, schienengeführter Verteil- bzw. Mischwagen, selbstfahrender Futterverteil- bzw. Futtermischwagen) und das Antriebssystem (Stromschleppkabel, Stromschienen, Batterie, Verbrennungsmotor) dar (Wendl, 2011).
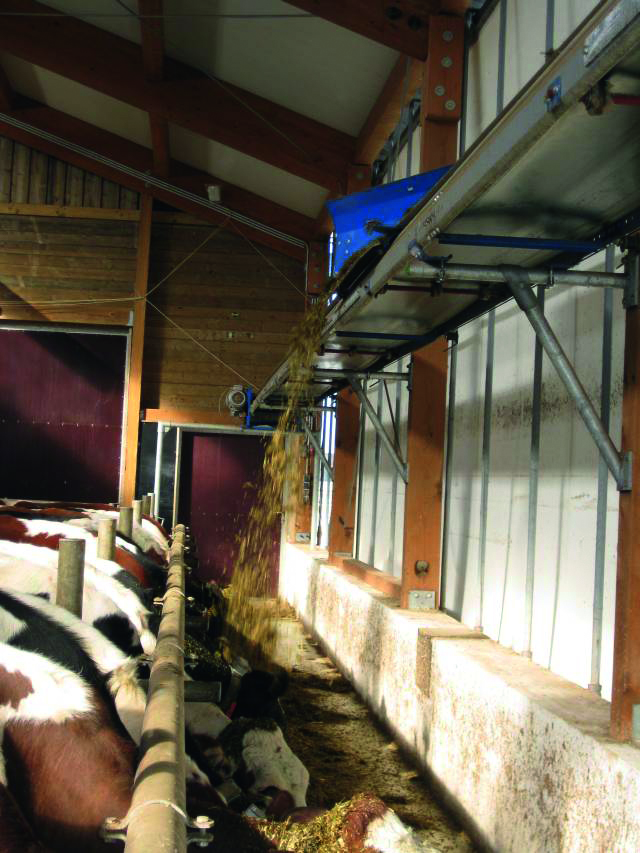
Stationäre Systeme sind als ortsfest zu beschreiben. Hier wird das Futter von einem stationären Mischbehälter weitergefördert, ohne dass sich die Anlage selbst zum Zielort bewegt. Dazu zählen die bereits in den 60er Jahren entwickelten und früher in ostdeutschen Großbetrieben eingesetzten Futterbänder (Heber, 2011; Wendl & Harms, 2007). Diese sind über dem Futtertisch montiert. Das Futter wird mit Hilfe eines Förderbandes über den Futtertisch gebracht und von dort durch einen beweglichen Schieber abgeworfen (Abbildung 3) (Jungbluth et al., 2005). Beispielsweise bieten die Firmen GEA und Pellon Bandsysteme an. Aber auch die Ausbringung der Futtermischungen durch einen schienengeführten Verteilwagen wird angewendet. Muss der stationäre Mischer mechanisch vom Landwirt befüllt werden, ist die Anzahl der maximal möglichen Rationen durch die Anzahl der Rationsmischungen begrenzt (Stufe I). Häufig werden in der Praxis 2 – 3 Mischungen erstellt, von denen die letzte den laktierenden Kühen mehrmals am Tag vorgelegt wird. Erfolgt das Befüllen des Mischers jedoch automatisch und ohne die Notwendigkeit der Anwesenheit einer Bedienperson (Stufe II + III), können je nach Kapazität der technischen Komponenten viele und leistungsbezogene Rationen gemischt und verteilt werden.

Eine weite Verbreitung in der Praxis finden hierfür stationäre Systeme mit einem schienengeführten Verteil- oder Mischwagen. Vor allem in skandinavischen Ländern werden diese eingesetzt (Wendl & Harms, 2007). Das schienengeführte System setzt sich aus einem Verteilwagen mit oder ohne Mischfunktion und aus Vorrats- oder Mischbehältern zusammen (Abbildung 4). Über Schienen, Weichen und Kontaktpositionen wird die für die Fahrten erforderliche Strecke definiert. Der Wagen wird automatisch mit den einzelnen Komponenten von den Vorrats- oder Mischbehältern befüllt. Anschließend wird die Ration der entsprechenden Tiergruppe vorgelegt.



Je nach technischer Ausstattung können die Vorrats- oder Mischbehälter mechanisch über Schlepperanbaugeräte oder automatisch aus Hoch- bzw. Tiefsiloanlagen befüllt werden (Grothmann & Nydegger, 2009). Mit derartigen Verfahren ist das Erstellen und Verteilen mehrerer Rationen pro Tag möglich (Stufe II). Verschiedene Hersteller beschäftigen sich intensiv mit der Weiterentwicklung dieser Systeme.


Eine Besonderheit stellen die mobilen Systeme dar. Hierbei können zwei Varianten unterschieden werden: der mobile autonom fahrende Futterverteilwagen mit einem vorangestellten stationären Mischer und der mobile autonom fahrende Futtermischwagen. Als Beispiel für ersteren ist der Multifeeder V4 des Systems Cormall-CCC-Robot zu nennen. Dabei handelt es sich um einen autonom fahrenden Futterverteilwagen, der neben dem Verteilen des Futters auch die Entnahme der Futtermischungen von Vorratsbehältern, sogenannten „Mischtischen“, selbstständig durchführt (Wendl, 2011).
Der Wagen wird über Induktionsschleifen im Boden und Sensoren gelenkt. Mit diesem Gerät können Herstellerangaben zufolge bis zu 800 Kühe versorgt werden. Angetrieben wird der Multifeeder V4 über einen Dieselmotor. Diese Variante kann auch manuell vom Landwirt gesteuert werden (Abbildung 5). Auch das System Innovado von Schuitemaker arbeitet nach einem ähnlichen Prinzip. Dieses Verfahren kann seinen Mischbehälter selbstständig am Flachsilo befüllen (Heber, 2011; Wendl, 2011).
Der Hersteller Lely präsentierte im Frühjahr 2012 ebenfalls ein autonomes System (Vector). Dieser selbstfahrende batteriebetriebene Mischwagen wird im Futterlager mit einem Greifer befüllt, mischt die Komponenten angedockt am Stromnetz, fährt anschließend batteriebertrieben über Metallschleifen im Boden zum Stall, tastet sich mit Hilfe von Ultraschallsensoren entlang des Fressgitters und verteilt dort die jeweiligen Rationen (N. N., 2012). Eine weitere Besonderheit des Vectors von Lely stellt seine Fähigkeit dar, über einen Sensor die Futterrestmengen am Futtertisch zu erfassen und entsprechend des Bedarfs frisches Futter nachzulegen. Desweiteren schiebt dieses Gerät ebenfalls das Futter nach (Abbildung 6).
2.2. Technik
2.2.1 Verfahrensglieder der Prozesskette
Auf die einzelnen Glieder der möglichen Prozessketten automatischer Fütterungssysteme in Abbildung 1 soll nun näher eingegangen werden.
Entnahme und Transport
Für eine zügige Entnahme und einen reibungslosen Transport der Komponenten sind folgende Aspekte zu berücksichtigen:
- Entnahmegeräte mit einem hohen Fassungsvermögen (Greifschaufel, Schneidschaufel, Schneidzange, Greifzange, Blockschneider ➝ Geräte am Front oder Heck von Schlepper oder Radlader angebaut)
- kurze Wege von Futterlager zu Vorrats- bzw. Mischbereich
- befestigte Wege
Bevorratung/Zwischenlager
Die Bevorratung der Komponenten kann in Vorratsbehältern oder in einem überdachten Vorratsbereich mit Kranentnahme erfolgen. Letzteres Konzept verfolgt der Hersteller Lely. Für diese Art der Komponentenlagerung wird ein möglichst freitragendes Hallenkonzept empfohlen, welches mit drei verschiedenen Varianten einer Krananbringung mit Greifer ausstattbar ist (feste Schiene, Brückenkran, Portalkran).
Tabelle 1: Ausführung und Dimensionierung der Vorratsbehälter verschiedener Hersteller automatischer Fütterungssysteme
| Eigenschaft→ | Bevorratung | Bodengestaltung | Dosiersystem | Maße (m) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Hersteller ↓ | Blöcke | Ballen | lose | Kette | Schub- boden | offen | ge- schlos- sen | Schneideinrich- tung | Fräswalze | Dosier- walze | Länge | Breite | Höhe (Gesamt) |
| DeLaval | x | x | x | x | x | 4,6 – 9,6 | 2,1 | 3,7 (Stützfüße variabel) | |||||
| GEA/Mullerup | x | x | x | x | x | x | 3,5; 6,0; 9,0 | 3,0 | max. 4,5 | ||||
| Hetwin | x | x | x | x | x | x | x | 6,1; 7,1 | 2,1; 2,4 | 1,8; 2,7 (Stützfüße variabel) | |||
| One2Feed | x | x | x | x | x | ||||||||
| Pellon | x | x | x | x | x | x | 5,1; 7,1; 9,1 | 2,3 | 3,2 – 5,4 | ||||
| Schauer/ Rovibec | x | x | x | x | x | 5,4 | 2,7 | 3,7 | |||||
| Trioliet T30 | x | x | x | x | 6,6 | 3,0 | 3,5 | ||||||
| T40 | x | x | x | x | 6,0; 7,4; 8,7 | 1,96 | 2,5 | ||||||
| Wasserbauer | x | x | x | x | x | x | 6,0 | 2,5 | 2,1 (Stützfüße variabel) | ||||
Am häufigsten werden die Futtermittel jedoch in Vorratsbehältern gelagert. Deren Ausstattung ist herstellerbezogen unterschiedlich. Tabelle 1 soll einen Überblick über verschiedene Varianten geben.
Die Lagerung der Silagen in den Vorratsbehältern kann lose oder herstellerbezogen auch in Ballen oder Blöcken erfolgen. Es wird jedoch empfohlen, Silagen in Blöcken oder Ballen zu lagern, um die Lufteinwirkung und damit mikrobielle Veränderungen möglichst gering zu halten. Für die einzelnen Futterkomponenten in der Ration sind die erforderlichen Behältergrößen zu kalkulieren. Folgende Formel kann hierbei unterstützen:
VB = TZ * MengeK * (1/ρ) * (1/n) * (1/Vnutz) * 100
VB: Volumen Vorratsbehälter (m3)
TZ: Tierzahl
MengeK: Menge der Komponente je Tier und Tag (kg/Tier/Tag)
ρ: Dichte der Komponente (kg/m³)
n: Häufigkeit Befüllen Vorratsbehälter pro Tag
Vnutz: nutzbares Volumen der Vorratsbehälter (%)
In Tabelle 2 ist das benötigte Lagervolumen für Gras- und Maissilage (Greifschaufelentnahme) in Abhängigkeit verschiedener Tierzahlen aufgeführt. Bei der Grassilage handelt es sich dabei um adewagensilage und beim Mais um Häckselsilage.
Mischen
Das Mischen der Rationen kann je nach Fütterungssystem mit Hilfe eines stationären Mischers, eines schienengeführten Futtermischers oder eines mobilen Mischers erfolgen. Diese arbeiten nach den von Futtermischwägen bekannten Systemen (vertikal, horizontal, Freifall). Entsprechend der Ausstattung des Fütterungssystems kann der Mischer über Bänder von den Vorratsbehältern mit Futtermitteln befüllt werden. Unter den Bändern können sich jedoch Futterreste ansammeln – insbesondere von sehr feinem Material wie beispielsweise Luzerneheu – und zu einem Anhalten des Förderbandes führen. Um Ungenauigkeiten des Dosierens der Komponenten in den Mischer zu reduzieren, können die Bänder mit einer Wiegeeinrichtung ausgestattet sein, bei denen jedoch auch Schwachstellen auftreten können.
Die Wahl des Mischsystems sollte sich nach den vorhandenen und eingesetzten Komponenten richten (Länge von Stroh, Heu, Grassilage beachten!). Für eine gute Mischqualität der Rationen sind Halmlängen der Futtermittel von 3 – 4 cm zu empfehlen. Da jedoch Ladewagen- und Ballengüter häufig Halmlängen von ca. 15 cm aufweisen, ist eine Zerkleinerung der Komponenten erforderlich. Um dieser Forderung nachkommen zu können, sind zusätzliche Zerkleinerungseinrichtungen an der Fütterungstechnik notwendig oder darf lediglich gehäckseltes Material eingesetzt werden. Damit einhergehend kann ein geringerer Verschleiß der Technik erreicht werden. Flexible Drehzahleinstellungen können eine bessere Entleerungswirkung des Mischbehälters beim Austrag der Ration und geringere Restmengen gewährleisten. Viele Systeme besitzen desweiteren die Fähigkeit, ein Abweichen der Menge einer Futterkomponente in der Ration bei der nächsten Rationserstellung auszugleichen.
Transport und Verteilen
Folgende Transport- und Verteileinrichtungen finden ihren Einsatz (siehe Abbildung 1)
- Förderband
- Stationärer Verteilwagen
- Stationärer Misch- und Verteilwagen
- Mobiler Verteilwagen
- Mobiler Misch- und Verteilwagen
In Abhängigkeit des gewählten Verteilsystems (siehe Abbildung 2) werden unterschiedliche Anforderungen an Futtertischbreiten gestellt (Tabelle 3).
Es handelt sich dabei um Funktionsmaße, die sich bewährt haben. Dennoch sollte berücksichtigt werden, dass bei einem Ausfall des Fütterungssystems ein Befahren des Futtertischs mit einem Hoflader möglich sein sollte. Desweiteren besteht bei zu schmalen Futtertischen die Gefahr einer Vermischung verschiedener Rationen von gegenüberstehenden, unterschiedlichen Leistungsgruppen. Einige Hersteller bieten bei schmalen Futtertischen die Möglichkeit eines beidseitigen Austrags an, weshalb nur eine zentrale und mittig über dem Futtertisch positionierte Schiene erforderlich ist und gegebenenfalls die gegenüberliegenden Trogreihen versorgt werden können.
Je nach Verteileinrichtung ist ein anderes Tragwerk mit seinen jeweiligen Anforderungen an die Statik notwendig. Ein schienengeführter Misch- und Verteilwagen benötigt beispielsweise ein stärkeres Tragwerk als ein reines Verteilgerät. Die Schienenkonstruktion, an welcher die Verteileinrichtungen geführt werden, kann unter anderem verzinkt sein. Es kann jedoch bei dieser Ausführung zu einem Abrieb des Materials kommen, welches nicht in die Futtermittel gelangen sollte. Entsprechende Abhilfemaßnahmen sind zu schaffen.
2.2.2 Antriebssysteme der Misch- und Verteilverfahren
Je nach betrieblicher Situation bieten die Hersteller automatischer Fütterungssysteme je nach Energieversorgung unterschiedliche Antriebssysteme an. Die größte Vielfalt weisen dabei schienengeführte, automatische Fütterungssysteme auf. Die Antriebe sind jedoch mit mehreren Anforderungen sowie Vor- und Nachteilen verbunden (Tabelle 4). Mobile Fütterungsroboter können mit einem Dieselmotor oder einem akkuversorgten Elektromotor angetrieben werden. Auch Anlagen mit Förderbändern werden über Elektromotoren mit Strom versorgt.
| Strom- versorgung | Antriebs- leistungen | Anforderungen an die Technik | Vorteile | Nachteile |
| Stromschiene | 48 bzw. 400 V | Spritzwassergeschützt | Sichere Energieversorgung; gute Erweiterbarkeit; Steigungen überwindbar | Teurere Technik (Lauf- und Stromschiene); Weichenstellungen eingeschränkt |
| Schleppkabel | 400 V | Sichere Energieversorgung | Kurvenfahrten begrenzt möglich; keine beliebige Erweiterbarkeit; keine Weichenstellungen | |
| Akku | 12 V | Leistungsstarke Batterien (Ladedauer ca. 6 h/Tag) | Flexibler Einsatz; einfache Technik (Laufschiene) | Nur geringe Steigungen; lange Ladezeiten |
Die Konzeption der Futterhalle stellt einen wesentlichen Faktor für einen erfolgreichen Betrieb eines automatischen Fütterungssystems dar. Je nach Ausstattung der Fütterung und den betrieblichen Gegebenheiten sind verschiedene Anordnungen der Halle am/im Stall möglich (Abbildung 7). Doch sollten brandschutzrechtliche Aspekte, Möglichkeiten einer Stallerweiterung und von Stallzufahrten sowie die Anbindung der Fütterung an den Stall berücksichtigt werden.

Folgende weitere Aspekte sind bei der Planung zu beachten:
Dimensionierung
- Anzahl Komponenten gelagert in Vorratsbehältern und deren herstellerspezifische Größe beeinflussen Platzbedarf (Tabelle 1) ➝ 6 m-Raster ist zu empfehlen
- Ausstattung des Fütterungssystems beeinflusst Platzbedarf (stationärer Mischer und Verteileinrichtung benötigen zusätzlichen Raum)
- Traufhöhe: Beeinflussung durch die Stellung und die Höhe der Vorratsbehälter in Abhängigkeit von der Verfahrenstechnik (ausreichend Raum für Befüllen einplanen!) (Tabelle 5)

Abbildung 8 zeigt zwei Beispielslösungen für die Anordnungsvarianten der Vorratsbehälter.
Klimatisierung und Witterungsschutz
- Schutz vor Wärmeeinstrahlung (Sandwichplatten, Lösungen mit Dachschalungen)
- Schutz vor Regen, Schnee, Wind und Vögeln (Schubtore, Rolltore, Netze)
➝ Zufahrten berücksichtigen! - Lüftung im Sommer sicherstellen


Bodengestaltung
- glatter, planbefestigter Untergrund (erleichterte Reinigung)
- Ableitung Gärsaft und Reinigungswasser (Ablaufrinne zu Gärsaftbehälter; Bodengefälle)
(Abbildung 9)
Automatische Fütterungssysteme zeichnen sich durch einen geringeren Platzbedarf im Stall aus, weshalb Altgebäude mit niedrigen Deckenhöhen und enger Futtertischsituation meist leichter genutzt werden können als bei der Standardmechanisierung mit einem Futtermischwagen. Dadurch sind flexible Um- und Neubaulösungen möglich. Wie bereits in Tabelle 3 dargestellt, können schmale Futtertische und entsprechende bauliche Einsparungen erreicht werden. Falls eine Verbindung mehrerer Gebäude erfolgen soll, sind im Außenbereich liegende Schienen und Bänder zu überdachen, um einen störungsfreien Winterbetrieb zu gewährleisten.
2.4 Leistungen und Systemgrenzen
2.4.1 Kapazität
Je nach Ausstattung des Fütterungssystems – ob der Mischer mechanisch befüllt werden muss, Vorratsbehälter vorhanden sind oder die Entnahme der Silagekomponenten aus Hoch- oder Tiefsilos erfolgen kann – ist ein unterschiedliches Ergebnis bezüglich der Anzahl Futtermischungen und der Häufigkeit der Futtervorlage zu erwarten. Fütterungsverfahren mit einem stationären Mischer und einem gesonderten Verteilgerät besitzen hinsichtlich der Anzahl der zu versorgenden Tiere und der Bildung von Leistungsgruppen eine höhere Kapazität als ein System mit einem kombinierten Misch- und Verteilwagen. Denn während eine Ration ausgetragen wird, ist mit dem stationären Mischer bereits die Erstellung einer weiteren Futtermischung möglich. Folgende weitere Faktoren entscheiden über die Kapazität der Systems:
- Antriebsystem (erforderliche Ladezeiten bei akkubetriebenen Anlagen berücksichtigen)
- Entfernung zwischen Futterhalle und den zu fütternden Gruppen sowie einzelnen Stallgebäuden
- Anzahl zu fütternder Gruppen
- Häufigkeit der Futtervorlage pro Tag
- systembedingte Einstellungen
Herstellerangaben zufolge sind bis zu 300 Kühe mit einem Fütterungssystem der Stufe II zu versorgen, wenn maximal etwa 15 Gruppen und ca. 10 Komponenten in einer Ration gefüttert werden. Jene Aussagen sind kritisch zu betrachten und die betriebsindividuellen Verhältnisse zu prüfen. In Großbetrieben mit beispielsweise 1000 Kühen sind vor allem Fütterungssysteme mit einem stationären Mischer und einer Bandverteilung vorzufinden. Hier wäre jedoch auch die Kombination mehrerer schienengeführter oder mobiler Misch- und Verteilwagen denkbar.
2.4.2 Hygiene
Wie bei den Futtermischwägen ist auch bei automatischen Fütterungssystemen auf einen hohen hygienischen Zustand der Anlage zu achten. Die Dauer der Futtermittellagerung sollte der Stabilität der Silagen und den Außentemperaturen angepasst werden. So ist bei heißen Temperaturen im Sommer eine tägliche oder bei unzureichender Silagequalität sogar eine zweimal tägliche Bevorratung der Silagen in den Behältern zu empfehlen. Im Winter können die Silagekomponenten jedoch mindestens 24 h zwischengelagert werden (Maier et al., 2013). Desweiteren sollte erst bei einer weitestgehend vollständigen Entleerung der Behälter frische Silage nachgefüllt werden. In den Vorratsbehältern zurückbleibende Futterreste sind ebenfalls regelmäßig (zwei- bis dreimal pro Woche) zu entfernen, um eine hygienische Belastung der Futtermittel zu vermeiden. Eine schlechte Qualität der Silagen kann zu einer Beeinträchtigung der Tiergesundheit führen und eine vermeidbare Emissionsquelle darstellen. Um einen möglichst geringen Nährboden für Schadnager zu bilden, ist die Futterküche wöchentlich zu reinigen (Besenreinigung, Reinigung der Vorratsbehälter mit Hochdruckreiniger). Aus diesem Grund ist eine wie unter Punkt 2.3 angesprochene Bodengestaltung vorzusehen (Abbildung 9).
Desweiteren ist die Gestaltung und Stellung der Vorratsbehälter entscheidend für die Reinigungsmöglichkeit. Werden die Behälter schräg angeordnet, muss eine ausreichende Höhe einkalkuliert werden, um Futterreste unter dem Behälter beseitigen zu können. Insbesondere eine waagrechte Stellung der Vorratsbehälter erfordert eine hohe Dichtheit der Behälter, um Bröckelverluste zu vermeiden. Einzelne Hersteller bieten eine technische Möglichkeit an, um die vom Kratzboden mitgeführten Futterreste entfernen zu können. Eine am vorderen Ende des Vorratsbehälters vorhandene Klappe und ein dort integrierter Abstreifer soll das Entfernen von Futterresten ermöglichen (Abbildung 9). Es ist jedoch darauf hinzuweisen, dass die Reinigung der Vorratsbehälter einige Zeit vom Landwirt in Anspruch nimmt und von Seiten der Hersteller noch Optimierungsbedarf bei den Anlagen besteht.


2.4.3 Software (Management)
Systembedingt werden von den Herstellern verschiedene Softwarelösungen angeboten. Doch wird die Forderung nach ISOagriNET kompatiblen Systemen immer größer. Dadurch soll ein Hersteller übergreifender Datentransfer und eine systemübergreifende Dokumentation aller im Stall vorhandener Techniken (z. B. Automatisches Melksystem, Automatisches Fütterungssystem, Spaltenreinigungsroboter, Lüftungstechnik, …) ermöglicht werden.
Die Mehrheit der Eingabedisplays am Verteilgerät ermöglicht die Eingabe von Rationen, Fütterungsfrequenzen und -zeiten sowie Gruppeneinteilungen. Desweiteren wird die Kopplung mit Futtermanagementsoftware und Stallrechnern ebenso wie der Zugriff auf die Systeme über Smartphones angeboten. Bei allen Anlagen ist eine Alarmierung des Landwirts bei Störungen über eine SMS oder einen Anruf Standard. Die Informationen über aufgetretene Störungen und Daten der Fütterung können in separaten Listen (Log-Files) eingesehen und gesichert werden.
2.4.4 Arbeitssicherheit
Automatische Fütterungssysteme zeichnen sich durch eine große Variabilität der Kombinationsmöglichkeiten einzelner Komponenten aus. Die Anlagen können entweder komplett von einem Hersteller, oder einzelne Bestandteile des Systems von mehreren Anbietern bezogen werden. In letzterem Fall stellt sich die Frage nach den Verantwortlichkeiten und nach der Haftung im Schadensfall. Es werden zwar für jedes Bestandteil des Systems von Seiten der Hersteller Konformitätserklärungen gegeben, doch ist im Schadensfall zu klären, wer nun haften muss – der Betreiber (Landwirt), der Hersteller oder die Elektroinstallationsfirma, welche die Anlage angeschlossen hat. Hier sollte vor Einbau und Inbetriebnahme der Anlage in einem gemeinsamen Termin mit der zuständigen Berufsgenossenschaft und den einbezogenen Herstellern und Installateuren am Betrieb eine Klärung herbeigeführt werden. Die Institutionen können im Vorfeld bereits auf denkbare Gefahrenquellen der Anlagen hinweisen und eine entsprechend angepasste Bauweise ermöglichen. Folgende potenzielle Gefahrenquellen können durch entsprechende Planung vermieden werden:
- Förderbänder sollten an der Unterseite durch Bleche geschlossen sein und einen leichten Zugang verhindern.
- Vorratsbehälter sollten an der Unterseite geschlossen sein, damit keine Gefahr für Personen durch die umlaufenden Ketten bestehen kann.
- Vorratsbehälter sollten an der Vorderseite soweit geschlossen sein, dass aufrecht stehende Personen nicht problemlos hineingreifen können.
- Bei der Mischeinrichtung (z. B. stationärer Mischer) muss durch geeignete Sicherungen und möglichst keinen ebenerdigen Einbau eine Sturzgefahr für Personen verhindert werden.
- An der Anlage sowie in der Futterhalle sollten mehrere „Not-aus-Knöpfe“ an wichtigen Stellen/Positionen angebracht werden, um das Fütterungssystem im Notfall schnellstmöglich anhalten zu können.
- Die Verteileinrichtung muss mit einer Sicherheitsvorkehrung ausgestattet sein, die das Anhalten des Gerätes bei definierten Widerständen auslöst. Andernfalls muss der Abstand des Geräts zum Boden so groß (> 0,5 m) dimensioniert werden, dass der Verteilwagen beispielsweise über eine liegende Person ohne Schaden hinwegfahren kann.
3. Wichtige Planungshinweise
Nachfolgend sind die wichtigsten Aspekte für die Planung eines automatischen Fütterungssystems zusammengefasst.
Fütterungssystem
- Wahl eines zum Betrieb passenden Fütterungssystems
- Möglichkeit beliebiger Leistungsgruppenbildung
- Möglichkeit der Fütterung aller Tiere am Betrieb
- Vorhandensein geeigneter Entnahmetechnik
- Planung der Anzahl Vorratsbehälter und ausreichender Lagerkapazität
- Wahl des zu den Futterkomponenten passenden Mischsystems
- Abhilfe bei Ausfall der Fütterungstechnik
- Maßnahmen zur Unfallverhütung
Futterhalle
- Anordnung passend zum Betriebsablauf (extern, traufseitige bzw. giebelseitige Erschließung)
- Dimensionierung (Platzbedarf der Technik, Gebäude- und Traufhöhe)
- Klimatisierung und Witterungsschutz
- Bodengestaltung (glatter, planbefestigter Untergrund mit der Möglichkeit zur Ableitung von Gärsaft und Reinigungswasser)
Weitere bauliche Aspekte
- Berücksichtigung von Erweiterungsmöglichkeiten des Stalls und der Futterhalle
- Futtertischbreite (systemabhängig)
- Statische Anforderungen (Traglasten der Konstruktion, eigenes Tragsystem)
LfL-Information „Automatisches Füttern im rinderhaltenden Betrieb“. Informationstag.
Hrsg. Bayerische Landesanstalt für Landwirtschaft. 18. Februar 2014, Grub.
LfL-Information „Automatisches Füttern im Milchkuhbetrieb“. Informationstag.
Hrsg. Bayerische Landesanstalt für Landwirtschaft. 06. Februar 2014, Grub.
LfL-Schriftenreihe „Tierhaltung in Bayern – Quo vadis?" Landtechnisch-bauliche Jahrestagung und Eröffnung der Lehrschau.
Hrsg. Bayerische Landesanstalt für Landwirtschaft. 25. Oktober 2011, Grub.
Tagungsband der 11. Tagung Bau, Technik und Umwelt in der landwirtschaftlichen Nutztierhaltung, 24. – 26. September 2013, Vechta
55 Antworten zur Automatischen Futtervorlage beim Rind (2012).
Hrsg. DLG-Verlag GmbH, Frankfurt am Main.
Vervielfältigung und Übertragung einzelner Textabschnitte, Zeichnungen oder Bilder (auch für den Zweck der Unterrichtsgestaltung) sowie Bereitstellung des Merkblattes im Ganzen oder in Teilen zur Ansicht oder zum Download durch Dritte nur nach vorheriger Genehmigung durch DLG e.V., Servicebereich Marketing, Eschborner Landstraße 122, 60489 Frankfurt am Main, Tel. +49 69 24788-209, M.Biallowons@DLG.org
Kontakt
DLG e.V. • Michael Biallowons • Tel.: +49 69 24 788-209 • M.Biallowons@DLG.org





