Novatel Smart 6L receiver
DLG-APPROVED: PPP Automatic Steering Test


A “DLG APPROVED test for individual criteria” quality mark is awarded to farm machinery that has passed a limited test programme within a DLG usability test, which is conducted in accordance with independent and approved assessment criteria. The purpose of the test is to highlight a product’s specific innovations and key features. The test may be carried out either to criteria laid down in the “DLG Full Test” framework for technical products or may include further features and properties that confirm a specific value to the product. The minimum standards to be applied to the product, the test conditions and procedures, as well as the criteria by which the test results are to be evaluated, are defined in cooperation with a DLG group of experts. These parameters reflect the acknowledged state of the art as well as scientific findings and agricultural insights and requirements. After a product has passed the test, a test report is published and the quality mark is awarded and will remain valid for five years from the date of award.
The systems that were submitted to the “PPP Automatic Steering Test” are the NovAtel SMART 6L Receiver with TerraStar-C and TerraStar-L correction services as one possible configuration of the Fendt automatic steering system “VarioGuide RTK”. For the test, a Fendt 828 Vario was used as the test tractor.
The DLG APPROVED full test for “Automatic Steering Systems” includes testing of the accuracy and operation of automatic steering systems in agricultural vehicles. In addition to measuring the steering accuracy under various operating conditions, examinations were also performed on operation, the system’s display and control elements, the operating instructions and help functions, and the safety devices. Other criteria were not investigated.
The test was performed without shading conditions, as Precise Point Positioning (PPP) correction signal shading needs an update of the DLG testing framework. The update of the testing framework as well as the re-examination will be carried out in the first quarter of 2018.
The Product
NovAtel Automatic Steering System with TerraStar-C or TerraStar-L correction signals
Description and Technical Data:
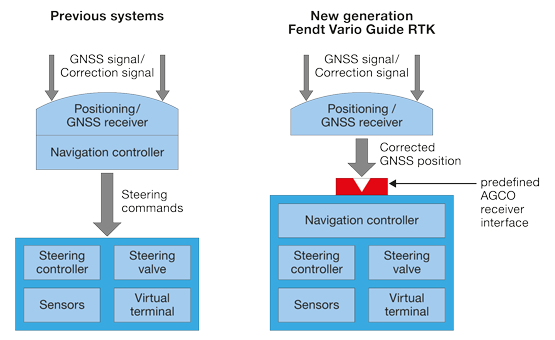
The previous Fendt guidance/steering system consisted of two major parts:
- first, an integrated GNSS receiver and navigation controller that received GNSS and correction data, computed the position and used this position to generate steering commands, and
- second, the tractor hardware, steering controller, steering valve, sensors and the display terminal that controlled tractor lateral motion and provided the user interface for operation of the steering system.
The new generation of the Fendt “VarioGuide RTK” guidance/steering system has separated the GNSS receiver and navigation controller and moved the navigation controller to the tractor side of the system.
This means that the corrected GNSS position is now transferred to the tractor instead of the steering commands (Figure 2). This provides a flexible solution for farmers to choose different Fendt-approved GNSS receivers that best meet their needs for use with their VarioGuide system. The NovAtel system used in this test consisted of a NovAtel SMART6-L receiver in combination with two different types of NovAtel correction signals.
The TerraStar-C correction signal provides a centimeter-level overall system accuracy. The TerraStar-L correction signal provides a decimetre-level system accuracy. Both correction signals are transmitted to the SMART6-L receiver on the tractor via geostationary satellites.
The NovAtel SMART6-L is a high performance, cost-effective GNSS-receiver solution. RTK accuracy can be achieved using NTRIP corrections transmitted over a cellular radio link. The receiver can provide RTK accuracy for up to one minute after losing RTK correction signals. The receiver can also bridge RTK outages beyond one minute when falling back to an EGNOS position. The fall back will smoothly and slowly transition between RTK and EGNOS level accuracy.
The NovAtel System provides a special system to react to signal losses: GLIDE is NovAtel’s proprietary filtering method optimized to provide a superior 15-minute (short term) pass-to-pass repeatability. GLIDE works best with SBAS corrections, such as EGNOS, but can also be used autonomously without corrections. The GLIDE filter provides smooth, robust positions making it especially effective when used as a fallback solution during RTK or TerraStar-C correction outages. NovAtel’s STEADYLINE technology reduces position jumps that can occur when a GNSS receiver changes positioning modes. This effect is especially evident when a receiver transitions from a high accuracy RTK position solution to a lower accuracy solution such as PPP (TerraStar), DGPS, SBAS+GLIDE or even autonomous GLIDE™. Smooth transitions are extremely important for precision agricultural steering applications where sudden jumps are disruptive.
In the test, the NovAtel receiver was mounted on a Fendt 828 Vario tractor with 280 kW power according to ECE R24. Further technical data, the measured vehicle geometry, the tyres used, and the settings parameters used for the steering system are summarized in table 2. The steering system’s settings were configured according to the manufacturer’s specifications.




The Test Results in Detail
As shown in the example of the A-B runs at 8 or 15 km/h, the NovAtel automatic steering system with TerraStar-C correction signal on a level track in Figure 10, the 95 % class of deviations is determined using the frequency distribution and the deviation class.
At a driving speed of 12 km/h, the system achieved accuracy in the 2-3 cm class in 95 % of the cases; in the long-term test with a repetition after more than 24 hours the values remained in the 3-4 cm class. The other results are summarised in Table 3 as well as in Figures 6, 7 and 8.
With the TerraStar-L correction signal, the measurements were in the region of 24-25 cm for the 95 % class of deviations in the case of an A-B run on an even track at 8 km/h.
The pass-to-pass error remained below 15 cm for both the 1 h duration test as well as three single test runs with a one-minute break after each run. The other results are also summarised in Table 3 as well as in Figures 9 and 10.
To determine the accuracy in the contour run, a reference line was manually driven along the semi-circular section of the test track and was recorded by the steering system. The deviation in the error class is expressed in relation to the reference run.
At a contour run at 5 km/h the TerraStar-C system reached the 2-3 cm class, while the TerraStar-L system reached the 10-11 cm class.
Table 3: Accuracy classes under various test conditions
| Test condition | 95 % class | ||
| TerraStar-C | TerraStar-L | ||
| A-B run on an even track at 8 km/h | 2-3 cm | 24-25 cm | |
| A-B run on an even track at 15 km/h | 3-4 cm | ||
| Contour run at 5 km/h | 2-3 cm | 10-11 cm | |
| Long-term accuracy: repetition after > 24h | 3-4 cm | ||
| 1 h duration drive A-B run on an even track at 8 km/h | 2-3 cm | 17-18 cm | |
| Pass-to-pass errors |
< 3 cm (1h duration test) |
< 15 cm (1h duration test) < 15 cm (three test runs with 1 min break between test runs) | |
| 1 h run* | < 19 cm | ||
| 1 h duration test** | < 10 cm |
A-B runs at 8 or 15 km/h
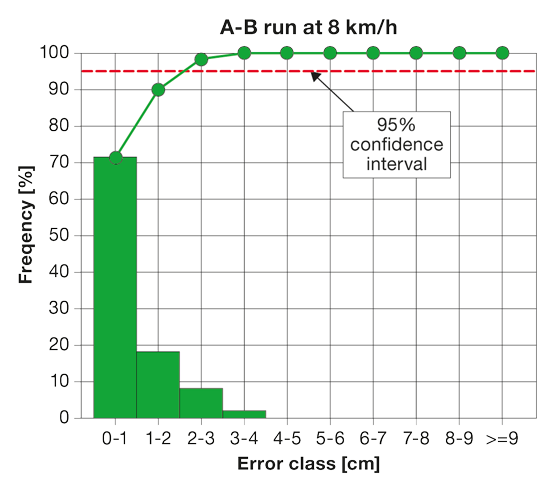
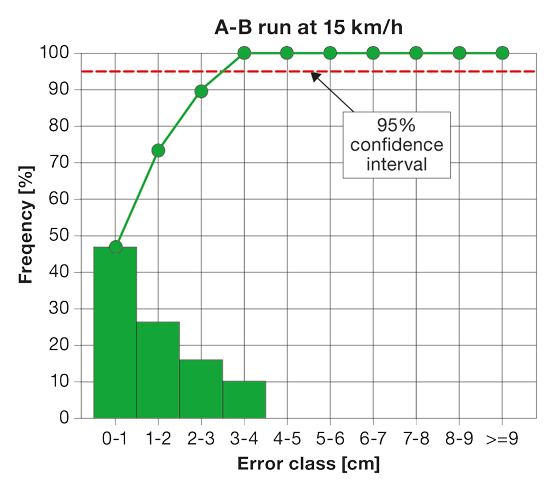
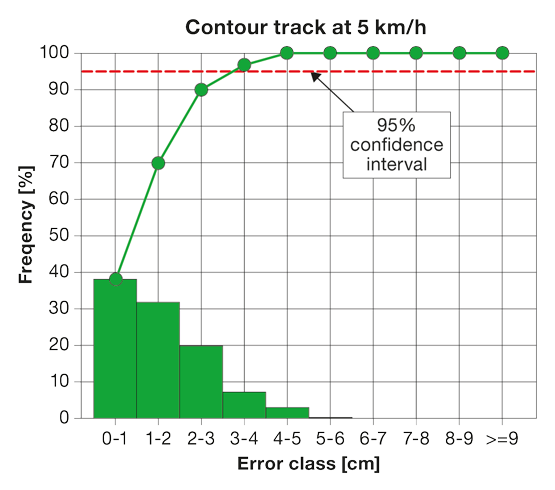

Figure 6: TerraStar-C Deviation rates
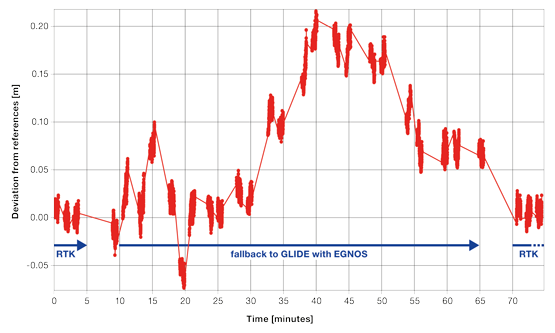
1 h duration drive A-B run on an even track at 8 km/h

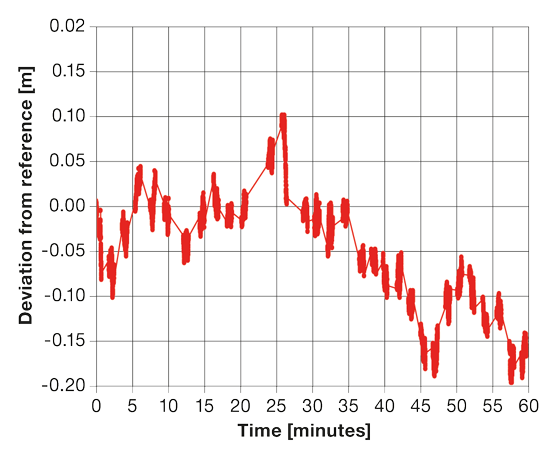
One hour run with fall back to GLIDE with EGNOS
Within the measurement of the performance of the positioning system when RTK corrections are lost and the receiver falls back to the GLIDE solution using STEADYLINE, the system reached the 18-19 cm class of deviations during the one hour run with fall back to GLIDE with EGNOS solution. In a one hour duration test, pass-to-pass errors during a fallback to GLIDE with EGNOS period reached the 10-11 cm class.
The suggested solutions to two predefined problems were determined in order to assess the operating instructions and the help system. Both a description of how an A-B track can be defined and an indication and possible solutions for signal errors like GPS or correction signal losses are available in the user manual. The assessment is, therefore “[+] = Better than the standard”.
For teaching in of an A-B track not more than two operating steps in the menu and one step for the useof the function “Quick-Jump” have to be carried out. Also the activation of the automatic steering function after teach-in is very easy. The assessment for both functions as well as the handling in total is therefore
“[++] = Significantly better than the standard”.
The terminal is integrated into the control unit in front of the right armrest and accessible in a very easy way. The display can be adjusted into all directions. Therefore, readability during daytime is always possible, even in the case of direct sunlight from behind. Also during night time, which was simulated in a dark hall at the DLG Test Center, readability of the display was very good. All three functions as well as the control elements and terminal in total were assessed with “[++] = Significantly better than the standard”.
The essential safety functions according to ISO standard 10975 (Tractors and machinery for agriculture – Auto-guidance systems for operator controlled tractors and self-propelled machines – Safety requirements) were evaluated as outlined in table 4.
Conclusion
The criteria of the test for a DLG-APPROVED quality mark for the single criterion “PPP autosteering test” assess the basic function of a system, as well as the deviations from the ideal line as described in detail above.
On a Fendt 828 Vario, the NovAtel SMART 6L receiver with the TerraStar-C correction system represents a state-of-the-art automatic steering system and can be recommended for use in agricultural machines and tractors The combination with the TerraStar-L correction system is recommended for purposes with a demand for lower accuracy.
Manufacturer and applicant
NovAtel Inc.
1120 – 68th Avenue N. E.
Calgary, Alberta
T2E 8S5 Canada
Contact:
Cor de Kuijper (Agriculture Sales Manager Europe)
Cor.deKuijper@NovAtel.com
Test performed by
DLG e.V.,
Test Center Technology and Farm Inputs,
Max-Eyth-Weg 1,
64823 Groß-Umstadt
Area of expertise
Vehicle engineering/vehicle testing
Project director
Dipl-Ing (FH) Andreas Ai
Test engineer(s)
Dipl-Ing (FH) Niels Conradi *
*Author
Contact
DLG TestService GmbH - Groß-Umstadt location • Max-Eyth-Weg 1 64823 Groß-Umstadt Germany • Tel.: +49(0)69 24 788-611 • tech@DLG.org